
Как мы можем помочь?
Коммуникационный драйвер
[p][dropcap3]К[/dropcap3]оммуникационный драйвер Movicon 11 разработан в формате независимой динамической библиотеки — DLL, который передаёт данные, хранящиеся в технологическом устройстве базе данных переменных и транслирует управляющие сигналы системе.[/p]
Проект Movicon 11 может работать сразу с несколькими драйверами, с определёнными ограничениями.
Список поддерживаемых протоколов
На сайте Progea.com можно увидеть полный список поддерживаемых Scada-системой Movicon 11 протоколов.
Автоматический импорт переменных
Коммуникационный драйвер для большинства протоколов поддерживает функцию Автоматического импорта переменных из программируемого логического контроллера или из другого технологического устройства.
Благодаря этой функции, разработчик имеет возможность значительно сэкономить время и избежать ошибок при ассоциации переменных ПЛК с объектами проекта Movicon 11. При импорте в базу данных проекта переносятся имя переменной, её тип и постоянный адрес.
Основные функции драйвера
[list-ul type=«circle»][li-row]Организует связь с технологическим устройством по адресу, указанному в свойстве объекта или в коммуникационном профиле.[/li-row][li-row]Автоматическая настройка параметров связи, оптимизирует производительность и эффективность канала связи за счёт автоматической группировки данных.[/li-row][li-row]Система управления параметрами связи, обмена данными и частотой опроса станции с гибким механизмом настройки.[/li-row][li-row]Автоматический импорт переменных из ПЛК или проекта.[/li-row][li-row]Использование языка VBA для управления работой драйвера.[/li-row][li-row]Управление связью с каждой переменной ПЛК.[/li-row][li-row]Функция шлюза, которая позволяет получить прозрачный доступ к устройству, например, через модем для удалённой работы с объектом.[/li-row][li-row]Поддержка TAPI для работы с проектом через модемы.[/li-row][li-row]Поддержка RAS для работы с проектом через Ethernet-модем.[/li-row][li-row]Развитые инструменты отладки и трассировки исполнения.[/li-row][/list-ul]
Производительность
Производительность драйвера зависит от количества получаемых данных и от используемого протокола. Например, при работе с контроллером Siemens Simatic–S7–314 c использованием протокола Simatic S7–TCP–IP при объёме данных 10 000 слов частота опроса драйвером будет составлять, примерно, 1,15 секунды.
Ограничения
В системах Win 32⁄64 проект может поддерживать 64 драйвера. В системах Win CE не рекомендуется использовать более 2 драйверов (максимально, 4). Каждый драйвер может работать с 128 станциями.
Как подключить драйвер
[p][dropcap3]Д[/dropcap3]ля того, что подключить новый драйвер в проекте Movicon 11 надо в окне Проекты щёлкнуть правой кнопкой в строке Real Time DB (База данных Real Time). В отрывшемся меню надо выбрать Новый драйвер коммуникации…
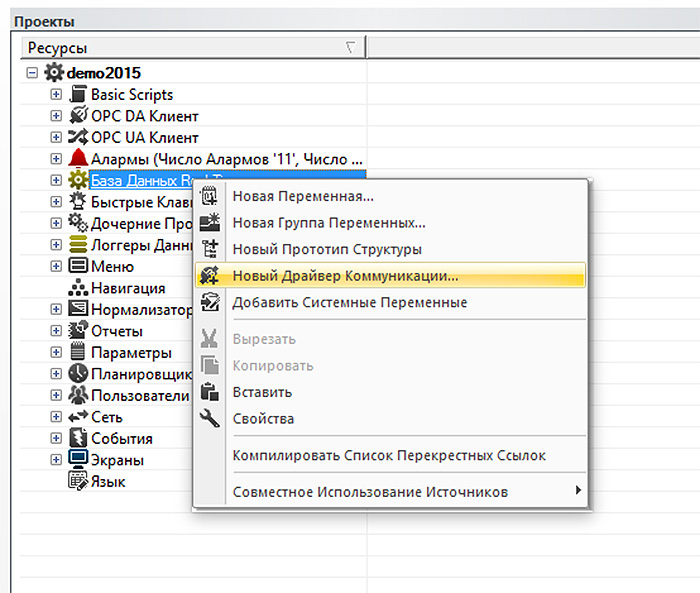
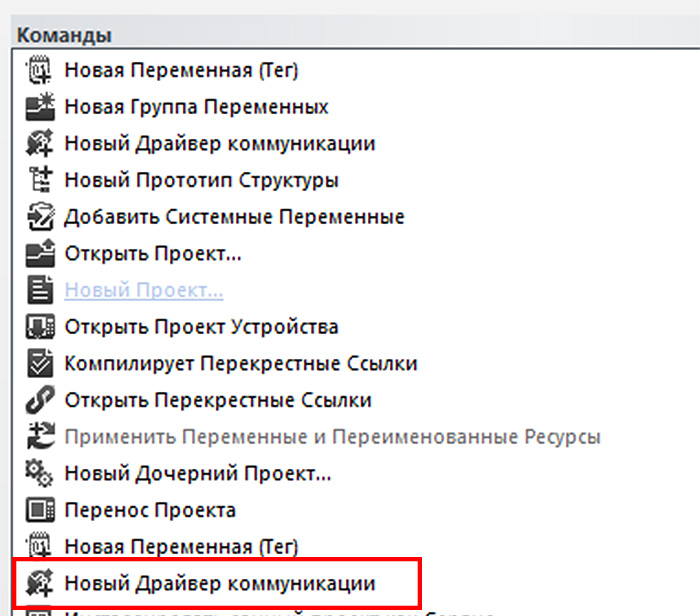
Такой же результат можно получить, если нажать такую же команду в окне Команды. [/p]
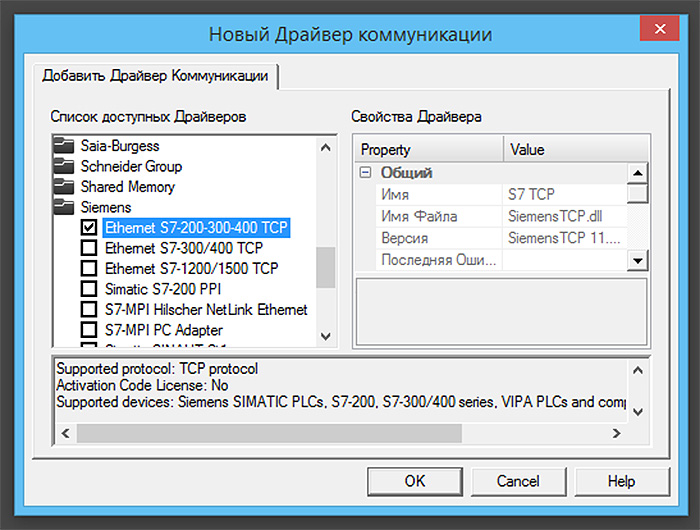
В открывшемся окне выберите производителя и нужный протокол.
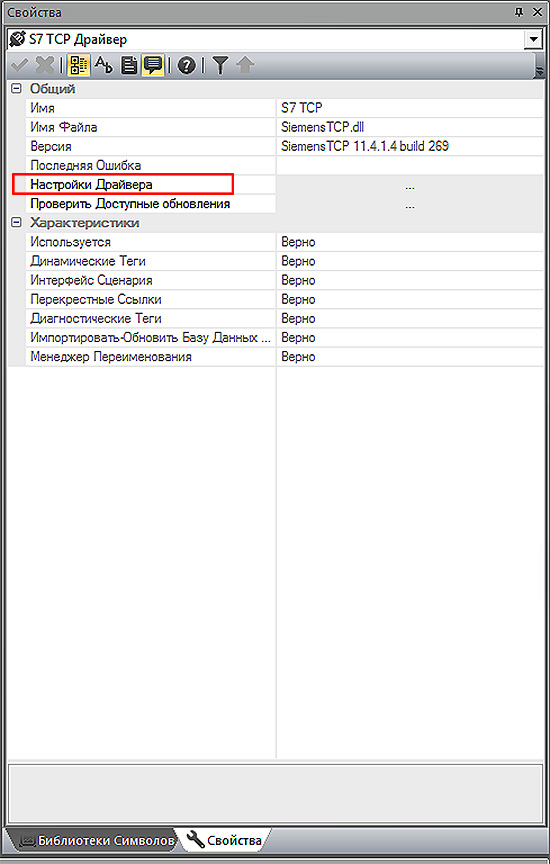
После выбора нужного драйвера необходимо его настроить. Для этого надо щёлкнуть правой клавишей мышки на его строке в окне Проекты.

В отрывшемся окне — оно может открывать как «плавающее», так и зафиксированное, например, справа от окна разработки — надо выбрать строку Настройки Драйвера в закладке Свойства. Такой же результат может быть достигнут, если дважды щёлкнуть на имени драйвера в окне Проекты.
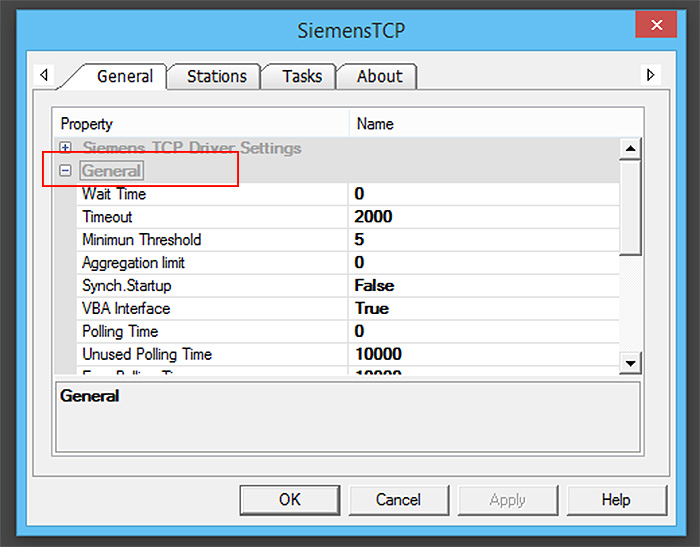
В закладке General выберите раздел General введите нужные настройки для работы драйвера в промышленной или локальной сети.
После этого надо добавить станцию (устройство) для начала обмена данными с этим устройством.
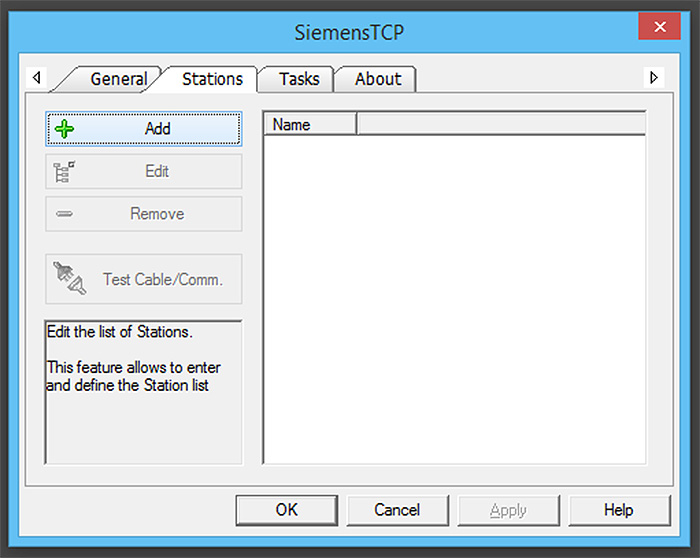
Щёлкнув на кнопке Add, открывается окно Свойств нового устройства.
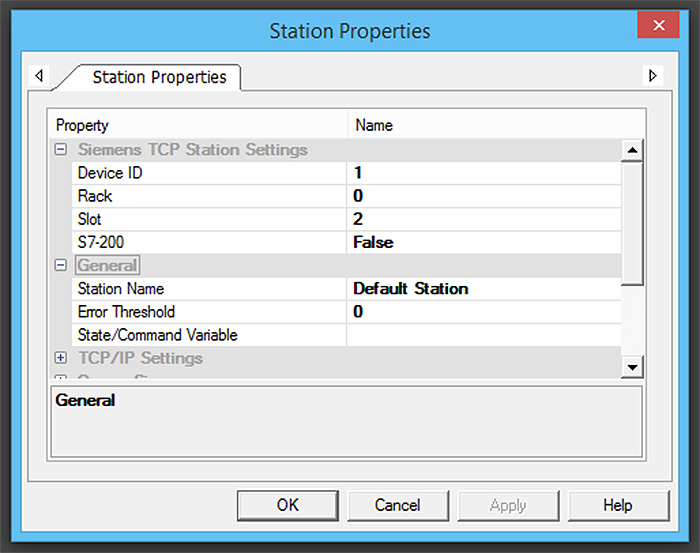
В этом окне вводятся свойства (новой) станции для начала обмена данными.
Активация коммуникационного драйвера
В Scada–системе Movicon 11 довольно много бесплатных коммуникационных драйверов, которые не надо покупать и они не нуждаются в активации. Однако, сложные драйвера надо приобрести и активировать. Подобно о процедуре активации читайте в отдельной статье «Активация коммуникационного драйвера».